BREAKING THE BOUNDARIES BETWEEN OCEAN AND SKY
MARINE DRONES FOR ECOLOGY AND RECONNAISSANCE
Find out how two innovative marine ecologists and some challenge-hungry engineers are paving the way for the development and applications of low-cost, fully waterproofed fixed-wing UAVs, with all the trimmings
November 2018
Two scientists tentatively put together the first water-landing amphibious fixed-wing UAV developed by engineers at Aeromao, on the bow of an industrial looking 65m patrol vessel, in the middle of the Indian Ocean. The wind was below 15 knots, the equatorial sun was shining. One scientist got behind the computer and held the RC controller, whilst the other one lifted the prototype UAV and got into position. A quick countdown before a successful launch. The UAV flew effortlessly around an island. All binoculars excitedly focussed on her. She then landed on the gentle ocean waves like a swan. Everyone gave a sigh of relief with huge smiles- they’d successfully landed their first fixed-wing amphibious drone on water in the Indian Ocean.
In late 2017, Dr Tom Letessier, a Norwegian marine biologist and conservationist at the Zoological Society of London, had the idea to explore the use of UAVs in marine ecology. He wanted a drone which would be resilient and far-ranging, good at gathering useable images for diverse types of analysis, cost effective and easy to use. He also wanted it to be 100% waterproofed for a life out at sea and here lay the challenge; to his knowledge, this hadn’t been done for applications in ecology and maritime surveillance of fishing vessels. After scouring the market, it was clear that a unit within the criteria and the institutions budget would be difficult to come by. He approached a few companies to see if anyone would be keen to develop the low-cost UAV as part of a bespoke pilot project. Canadian based company Aeromao Inc. took up the challenge, located in Mississauga, just outside of Toronto. The Colombian owner and engineer, Mauricio Ortiz, saw the opportunity as an enticing challenge and a chance to iteratively develop a brand-new UAV, alongside scientists.
The use of drones in ecology is becoming more commonplace, with most scientists using ‘off-the-shelf’ UAVs to gather images of animals and plants, to estimate populations of species, understand their dynamics and to monitor changes in habitats. Some scientists, such as those at the Royal Botanical Gardens at Kew (UK), use multispectral cameras on board eBee drones to detect subtle differences in foliage assemblages, whilst others use quadcopters to quickly survey small swathes of land or coast, looking for turtles, birds; anything really. But the use of UAVs in boat-based, remote maritime surveillance is still in it’s infancy.
The problem, and why water-landing UAVs are the solution
Letessier has been part of the BIOT Science team (#BIOTScience) for five years, which in recent years, received generous funding from the Bertarelli Foundation. BIOT, is the often casually thrown around acronym (by those in the know) for the British Indian Ocean Territories (aka Chagos), a tropical archipelago in the Indian Ocean, just south of the Maldives. It consists of tiny, scattered islands and reefs, but is mostly a water world, attracting marine scientists from a plethora of universities and institutions. Exclusive (and some argue glamourous) expeditions to the territory have run for several years now, with scientists researching corals reefs, birds, fishes, sharks, habitats, rat infestation impacts and climate change. These island reefs are known to be particularly pristine in a global context and contain very important colonies of tropical seabirds, which have been extirpated in other island chains in the tropics. Little is known about the distribution and relative abundances of marine megafauna (large marine animals) around BIOT islands. The traditional methods of dive transects and BRUVs (baited remote underwater cameras) are time consuming and can be spatially limited. The use of small aircraft as a survey tool for megafauna would be extremely costly, due to the remoteness of the location and proximity to the US military base. It therefore seemed a no-brainer to Letessier, to employ the use of a fixed-wing amphibious unit, which could land on water, for easy retrieval from the beach or using a small boat. There simply aren’t any other landing options, as the beaches are so narrow and the patrol vessel’s deck too short.
The territories have an exclusive economic zone which extends 200 nautical miles from the coast, and the British government have placed one ship, it’s crew and one fisheries officer, to patrol the entire 640,000km2. This entire zone was also declared a marine protected area in 2010, meaning that no fishing is allowed there. No people have lived on the islands since the late 60s, except for one atoll, which has a carefully protected US military base called Diego Garcia. So, what are the risks to these islands and animals, if no one lives there? The risk comes in the form of small to medium sized illegal fishing vessels which come to BIOT to specifically target large reef species, tuna and sharks for the fin trade. It is estimated that IUU (illegal, unreported and unregulated) fishing lands between 11 and 26 million tonnes of fish, globally per year. This means that global efforts to manage dwindling fish stocks get thwarted by criminals who ignore fisheries legislation and maritime laws. In BIOT, the patrol vessel is responsible for intercepting vessels which are fishing illegally in BIOT waters and has the power to start prosecution procedures, but only, if enough evidence is gathered against the perpetrators. Evidence comes in the form of fish on board caught in BIOT, evidence of banned fishing gear (metal lines and hooks specifically for catching shark) and the holy grail, a photo of the vessel, with its ID number clearly shown, with its gear in the water. This is the niche where a fixed-wing, long endurance UAV could make its mark- surveying for illegal vessels beyond the 12-nautical mile range of the on-board radar and being able to gather photographic evidence and then landing safely on the ocean, close to the patrol vessel, where the crew can easily jump in a small boat, to retrieve it.
Planning for success; applying tech to conservation
Letessier brought British MSc student Melissa Schiele, a self-described “tech geek”, on to the project, who was studying Conservation science at Imperial College London. The pilot project then bloomed into a two-pronged trial, on paper; the first objective was to see whether this UAV was an effective, water-proofed tool which can gather quality images from the field for robust ecological analysis. The other prong was to trial the UAVs efficiency as a tool to gather images of illegal fishing vessels and to aid in ocean-based enforcement surveillance. Science is exacting, and to prove that the UAV was a useful ecological tool, a sound ecological method needed to be devised, with a simple hypothesis to prove, or disprove. Taking cue from prior research at Lancaster University that had been done on the effect of invasive rat populations on some of the islands, it was decided to see if there was a detectable difference in the numbers of megafauna around islands with rats, compared to those without rats. It is known that islands without accidently introduced invasive rats, have large colonies of undisturbed ground-nesting seabirds. These birds produce vast amounts of droppings, which in turn leach through the island and into the surrounding reefs. These “fertilized” waters in turn, could attract more herbivorous fish. Letessier and Schiele therefore hypothesised that these rat free islands may support more megafauna, such as sharks and rays and that is where the UAV comes in- a tool which will be able to easily gather the required images around entire islands at a time, to then land on water nearby, to be retrieved by hand from the shore, or by a small speed boat.
The Water-landing amphibious UAV; a technical overview
This UAV is a bespoke design, which has been tailored by the ecologists that use it, and carefully crafted by the Aeromao team. The outer shell is made of polystyrene, making it lightweight and ensuring that the drone floats (very important at sea). The amphibious UAV (which is a cousin of the terrestrial landing Aeromapper Talon UAV) has a parachute for landing, but Letessier and Schiele removed this in the field, as it was decided that a parachute may cause more grief than good on deployment, in strong currents. The UAV is equipped with two cameras; one peers through the base of the fuselage, and one looks through the clear nose cone. The camera in the fuselage was a Garmin VIRB, which was chosen for its geotagging capability and price point. It was lightweight and was programmed to take a photograph every 1 second, at 12MP resolution. The camera in the nose cone is in fact a live-link camera, allowing the pilots on the ground to actually see where the drone is going, as it flies. This function makes the UAV an incredibly useful tool when surveying for either illegal vessels or for marine megafauna. The operational idea is that if the drone “sees” something, the pilot can alter the auto-pilot route, and in ‘fly-by-wire-B’ mode, inspect the area of interest, at leisure. This photographic duel-capability of this UAV, combined with the waterproofing and ease of use, could make it a game changer for marine ecologists and maritime patrol teams. When flown at 65m altitude, the camera provides a ground resolution of around 3.5 mega pixels per cm, allowing for relatively fine scale detail in the images.
The field expedition- a life at sea
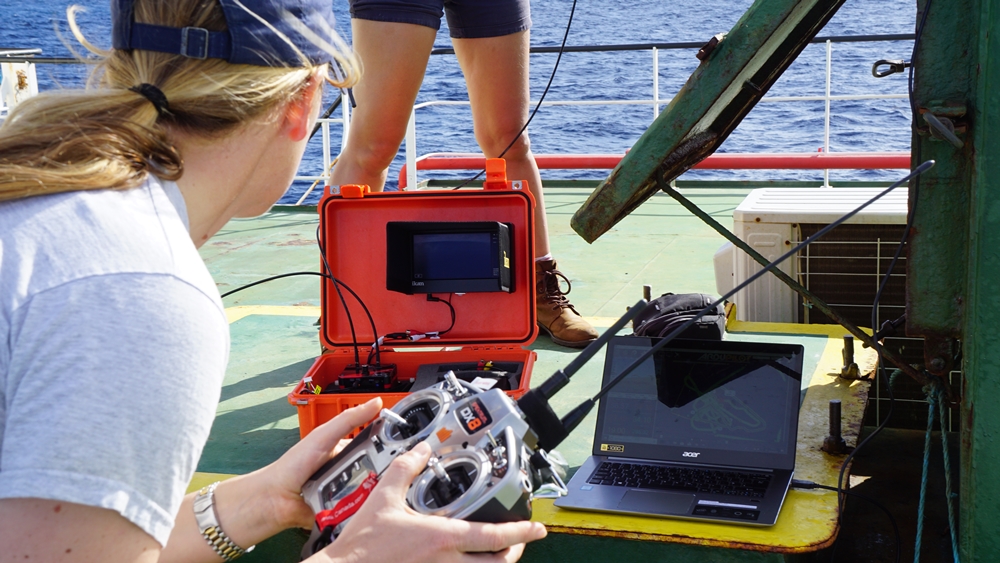
It was time for Letessier and Schiele to put their money where their mouths were. After both trained in Canada with the Aeromao team, they flew to the Maldives, where after a nail-biting three days as the military had detained the drones, they boarded the patrol vessel with around 12 other scientists, 13 crew, and all kit in tow. After three full days of rough sea travel, they arrived in the tropical archipelago of Chagos (BIOT). Plans were made to fly pre-designed transects at times which did not hinder the diving scientists and their need of the small RHIBs and also the times where crew were on hand to assist in drone retrieval, if needed. The first deployment was from the bow of the vessel. Letessier was the designated deployer and Schiele programmed the UAV, and piloted from the laptop, using Mission Planner. The first deployment was a success and the two ecologists, outliers in an expedition of coral and sea bed scientists, were ecstatic. Melissa Schiele explains “The fact that this type of method had never been trialled before to our knowledge, made our first flight at sea really important but also very nerve wracking. We are paving the way for a new type of marine field ecology. Yes, we are learning everyday how UAVs work and battling sand, salt and wind on a continual basis, but it is through our experiences that we are learning exactly what we need, to make this UAV a tool for fellow ecologists and marine protected area enforcement teams, who need an extra pair of eyes, which in turn will help them save fuel on boats, which can be extremely expensive, especially in developing nations.”.
After several deployments from the vessel, the two scientists decided to try their luck at a beach-based deployment. They took a RHIB, loading the drone in its pelicase, the laptop, all the aerials and plenty of water and sunscreen and headed to the nearest island. The location was stunning; a typical deserted tropical island, with only coconut palms and the odd seabird for company (some people get all the luck). It turned out, that although deployment was easy, being able to see the screen in glaring sun, having sand whipping around their faces and equipment, and the looming threat of impromptu rain storms, meant the first two beach deployments were more stressful that anticipated. The fisheries officer on board, then offered to assist on a beach deployment. He was ex-army and to the scientists’ delight, created a solid tarpaulin make-shift hanger- skills you don’t necessarily learn at university. The drone behaved well with only a few signal and leakage issues, and particularly excellent footage of an island called Grand Ile Coquillage was collected, which contained hundreds of sea birds and some sharks. However, the good run was short lived, as the winds of the incumbent south west monsoon, steadily increased. Several days were designated ‘grounded” by the Skipper as winds exceeded 19 knots. The enforcement trials were then run, with Mauricio Ortiz from Aeromao, joining Melissa and the fisheries officer, to conduct the trials to the UK governments specific criteria. It was found that the Garmin VIRB can detect fishing gear being towed by small vessels, from 65m altitude, but was unable to read the ID number on the hull. The live linked worked very well, with the fisheries officer, a complete novice drone pilot, being able to steer the drone as she watched the monitor, to follow the decoy ‘illegal fishing vessel’ boat. Overall, the experience was positive and has paved the way for future trials with the amphibious UAVs.
To infinity and beyond
After the expedition, Melissa Schiele analysed 25,000+ images for her MSc thesis. Although the weather hindered image collection she was still able to get some promising preliminary results, hinting that rats do indeed curtail the abundance of megafauna. The UAV had proven a useful tool in image collection on a large and rapid scale, far outdoing the image volume that a quadcopter could gather (range was tested to 13 km but is capable of up to 30km). Letessier and Schiele are now looking to build AI algorithms with the help of a third party digital image management company, which will ensure that no future MSc students will have to comb through thousands of images looking for sharks, turtles and other metadata (inevitably going cross-eyed). The system will be able to detect, document and interrogate the image sets, allowing for the scientists to analyse ever increasing volumes of photos, much faster. This AI algorithm, will eventually be incorporated into the live-link camera, allowing for a fisheries officer to deploy a UAV out to sea, and for an alarm to sound when something of interest is detected, freeing up the officer’s time to see do other things.
The project has gained a lot of traction, interest and support, with the next expedition being to Belize, where the newest amphibious drone iteration, complete with 20MP camera and higher resolution live-link system, will be tested at the Turneffe Atoll marine protected area, an area which, like BIOT, contains small and scattered islands in a coral sea. It is hope that the UAV will prove to be an essential tool in the fight against illegal fishing, in an area of the Caribbean, which has issues with shark and conch fishing as well as a general overfishing and a habitat degradation problem. Unlike BIOT, Belize has many people using the marine protected area for tourism and it is expected that changes in megafauna distributions, populations and dynamics, could be monitored using the amphibious UAV. Local rangers will be trained to use the UAV, meaning that precious and expensive boat fuel can be saved and channelled into other resources, expanding the capacity of governance, of the protection team; it is this that will fundamentally aid in the areas marine conservation and may increase the number of illegal fishing prosecutions with photographic evidence. Just the knowledge that the enforcement team has a spying UAV, may deter fishers from entering the area.
Based on the earlier success during the first trials, more are being pencilled in, which will support Letessier and Schiele’s claims that this UAV is without question, the next step in protected area maritime surveillance and ecological surveying. Melissa concludes “Fixed-wing UAV technology which is salt, and waterproof opens all the doors for ocean-based teams. This is just the beginning.”.